Die elektrische und elektronische (E/E) Architektur von Fahrzeugen hat sich dramatisch verändert, da Autos zu Computern auf Rädern werden. Verbraucher erwarten fortschrittliche Sicherheitsfunktionen und verlangen umfassende Technologie im Auto – alles Faktoren, die den rasanten Anstieg der Elektrifizierung und Konnektivität von Kraftfahrzeugen vorantreiben.
Elektronische Steuergeräte (ECUs)
Das Herzstück von E/E-Architekturen ist eine Reihe elektronischer Steuerungssysteme (ECUs) , bei denen es sich jeweils um eingebettete Systeme handelt, die ein oder mehrere Fahrzeugsysteme steuern. Typische Steuergeräte umfassen Motor-, Antriebsstrang- oder Getriebesteuerung; HVAC-Steuerung; Infotainment und Telematik. In modernen Fahrzeugen werden alle Systeme rund um Fahrerassistenz und automatisiertes Fahren, von Sensoren bis hin zu Aktoren, von Steuergeräten gesteuert. Diese Steuergeräte sind über Fahrzeugkommunikationsnetzwerke miteinander verbunden.
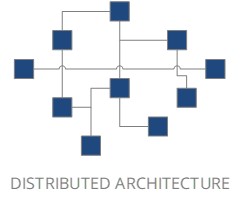
Die Geschichte der Automobil-Steuergeräte reicht bis in die Zeit zurück, als die Elektronik zum ersten Mal in Fahrzeugen Einzug hielt. In der Anfangszeit war jedes Steuergerät auf eine bestimmte Funktion beschränkt, beispielsweise Motorsteuerung, ABS-System oder Klimaanlage. Je mehr Funktionen den Fahrzeugen hinzugefügt werden, desto mehr Steuergeräte gibt es – bei einigen High-End-Autos bis zu 200. Steuergeräte wurden üblicherweise über langsame CAN-, LIN- oder ähnliche Busse miteinander verbunden. Diese Fahrzeugarchitektur wird als verteilte Architektur bezeichnet. Verteilte Steuergeräte sind in der Regel einfach und erfordern nur wenige Anforderungen an präzises Timing. Die Datenverbindungen waren langsam. Um Steuergeräte zu takten reichte ein Quarz oder gar ein ungenauer RC-Oszillator aus.
Im Laufe der Zeit, als immer fortschrittlichere Funktionen in Autos eingebaut wurden, ist die Zahl der Steuergeräte gewachsen. Diese wachsende Anzahl von Steuergeräten stellte hohe Kosten und eine erhebliche Herausforderung bei der Verkabelung dar. Gleichzeitig verbesserte sich die Prozessortechnologie jedoch so weit, dass ein Controller mehrere Funktionen verwalten konnte – was im Wesentlichen die Konsolidierung von Steuergeräten innerhalb einer Domäne ermöglichte. Daher wurde die Domänenarchitektur geboren.
Domänenarchitektur
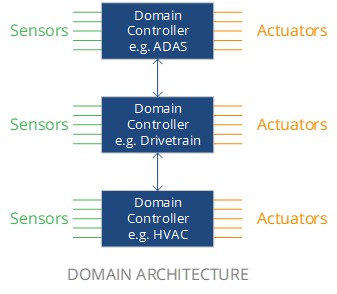
In einer Domänenarchitektur herrscht jedes Steuergerät über eine bestimmte Domäne. Jeder Domänencontroller ist mit den zu seinem Funktionsbereich gehörenden Sensoren und Aktoren verbunden. Typische Fahrzeugarchitekturen verfügen über die folgenden Domänencontroller:
- Konnektivität / Telematik
- Automatisiertes Fahren und Fahrerassistenzsysteme (AD/ADAS)
- Antriebsstrang / Fahrdynamik
- Körper und Komfort
- Erlebnis im Fahrzeug / Infotainment
Der Übergang zur Domänenarchitektur hat erhebliche Auswirkungen auf das Timing.
- Die Architektur basiert auf schnelleren Schnittstellen. Dies wird mittels Ethernet, FPDLink, GMSL und ähnlichen Schnittstellen erreicht. Hochgeschwindigkeitsschnittstellen benötigen Takte mit geringem Jitter, um ordnungsgemäß zu funktionieren. Übermäßiger Jitter erhöht die Bitfehlerrate (BER) auf dem Bus. In vielen Fällen sind eine hohe Taktgenauigkeit und Temperaturstabilität (mit anderen Worten niedrige ppm) von entscheidender Bedeutung.
- Die Komplexität der Steuergeräte hat zugenommen, daher werden mehr Takte benötigt. Einige Domänencontroller, insbesondere AD/ADAS, basieren auf mehreren Prozessoren (z. B. dem Haupt-SoC und einem Vision-Coprozessor), die alle über PCI-Express miteinander verbunden sind. PCI-Express Gen 4, das 2022 in Automobilsystemen weit verbreitet ist, erfordert einen 100-MHz-Differenztakt mit 500 fs Jitter (integriert über 12 kHz bis 20 MHz). Der jitterarme SiT9396-Oszillator ist ideal für die Erzeugung dieses Takts.
- Integrierte Taktgeneratoren rationalisieren die Stückliste und optimieren gleichzeitig andere Designparameter wie Platinenplatz, Stromverbrauch oder EMI. Für weitere Informationen zu Taktgeneratoren wenden Sie sich bitte an SiTime .
- Funktionale Sicherheit ist ein integraler Bestandteil heutiger Automobilsysteme. ASIL D ist bei den meisten Domänencontrollern obligatorisch. Uhren spielen eine wichtige Rolle bei der Unterstützung der Anforderungen an die funktionale Sicherheit.
Mit zonaler Architektur weiter gehen
So effizient und elegant die Domänenarchitektur auch ist, die vorgeschlagene Zonenarchitektur stellt eine Möglichkeit dar, elektronische Systeme im Automobil weiter zu optimieren. Dabei werden Sensoren und Aktoren unabhängig von ihrer Funktion an einen lokalen Zonencontroller oder Gateway angeschlossen. Zukünftige E/E-Architekturen werden aus einigen wenigen Controllern bestehen, die mit einem sehr leistungsstarken zentralen Computer verbunden sind. Diese Architektur hat das Potenzial, die Verkabelung weiter zu reduzieren und die Rechenleistung zu optimieren. Zonencontroller können den Zentralcomputer auch entlasten, indem sie Vorverarbeitungsaufgaben ausführen.
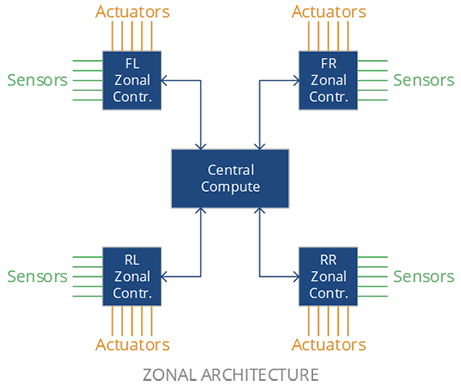
Die zonale Architektur ist stark auf Hochgeschwindigkeitsschnittstellen angewiesen. Die Anforderungen an das Timing werden sogar noch strenger sein als bei der Domänenarchitektur – sie erfordern noch geringere Taktschwankungen, eine höhere Timing-Genauigkeit und eine bessere Temperaturstabilität.
Wie die MEMS-Timing-Lösungen von SiTime helfen können
SiTime MEMS-Timing-Lösungen bieten die erforderliche Leistung für die heutige E/E-Architektur und die zonenorientierte Architektur von morgen. Im Vergleich zu quarzbasierten Zeitgeberkomponenten bieten SiTime-Geräte mehrere Vorteile, die besonders für Automobilanwendungen wichtig sind.
- Bessere Frequenzgenauigkeit, 10-mal geringere Alterung und hervorragende Temperaturstabilität – bis zu ±20 ppm (XO-Geräte) über -40 bis +125 °C und ±0,1 ppm (TCXO-Geräte) über -40 bis +105 °C.
- Bis zu 50-mal höhere Zuverlässigkeit. Abgesehen davon, dass die Anzahl der Feldausfälle reduziert wird, führt eine bessere Zuverlässigkeit zu einer niedrigeren FIT-Rate. Dies liefert bessere Hardware-Sicherheitsmetriken in einer FMEDA, der quantitativen Analyse, die im Rahmen einer Bewertung der funktionalen Sicherheit erforderlich ist.
- 100-mal bessere Widerstandsfähigkeit gegenüber Stößen, Vibrationen und elektromagnetischen Störungen aufgrund der geringeren Größe und Masse von MEMS-Resonatoren im Vergleich zu Kristallen. Wenn Stöße und Vibrationen keine dauerhafte Beschädigung des Kristalls verursachen, können sie zu Jitter in einem Quarzoszillator führen, der sich nachteilig auf die Bitfehlerrate einer Hochgeschwindigkeitsverbindung auswirken kann.
................................................. ..............
Ausgewählte MEMS-Oszillatoren für die Automobilindustrie
- Single-Ended-Oszillatoren: SiT8924 und SiT9025 mit Spread-Spectrum
- Differentialoszillatoren: SiT9396 und SiT9397
- Super-TCXOs: SiT5386 und SiT5387